
Le Ma
Senior Research Engineer @BIGAI
Humanoid Robotics & Embodied AI
I am currently a Senior Research Engineer at the Beijing Institute for General Artificial Intelligence (BIGAI) with Dr. Siyuan Huang and Dr. Baoxiong Jia . I received my Master's degree from the Hong Kong University of Science and Technology (HKUST) and my Bachelor's degree from Southeast University (SEU). Previously, I worked as an Algorithm Engineer at Baidu, Sany, and Beike.
My research interests lie at the intersection of Embodied AI, Humanoid Robotics, and Computer Vision. I am dedicated to tackling complex engineering systems, with extensive practical experience in Reinforcement Learning (RL), Teleoperation System, and Vision-Language-Action (VLA) model deployments.
Research & Projects
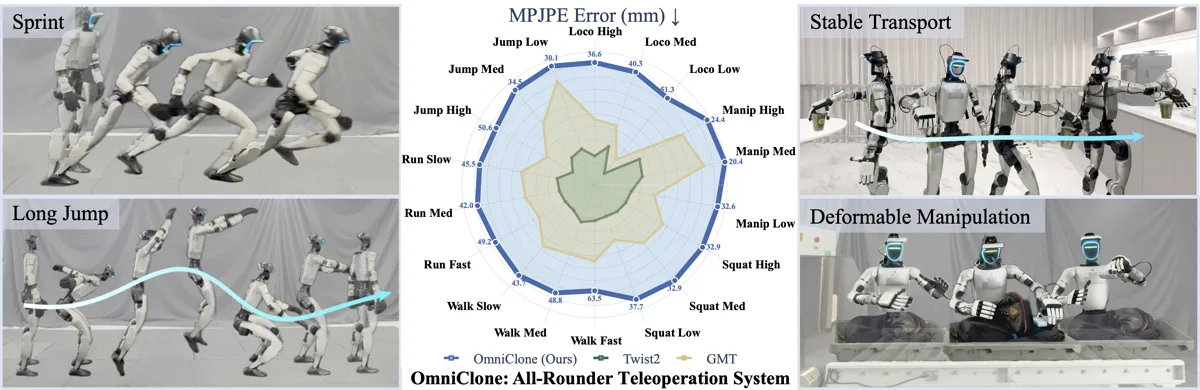
OmniClone: Engineering a Robust, All-Rounder Whole-Body Humanoid Teleoperation System
arXiv, 2026We present OmniClone, a robust and affordable whole-body humanoid teleoperation system that supports high-fidelity multi-skill control on a single consumer GPU. By combining OmniBench diagnostic evaluation with subject-agnostic retargeting and robust communication, it enables teleoperation, motion playback, and VLA-driven control within one unified policy.

StyleLoco: Generative Adversarial Distillation for Natural Humanoid Robot Locomotion
arXiv, 2025We introduce StyleLoco, a novel two-stage framework that bridges the gap between expert policies and human datasets through a Generative Adversarial Distillation (GAD) process. This approach enables humanoid robots to perform diverse locomotion tasks with high precision and natural human-like aesthetics.
SafeFall: Learning Protective Control for Humanoid Robots
arXiv, 2025We present SafeFall, a framework that learns to predict imminent, unavoidable falls and execute protective maneuvers to minimize hardware damage. The policy is trained with a novel, damage-aware reward function that shields critical components and absorbs energy with robust body parts.